Isotropia do espaço: Invariância do sistema para rotação.
A rotação do sistema é caracterizada por um vetor δφ, todo o sistema roda segundo este angulo.
Invariância do Lagrangiano do sistema: δL=0.
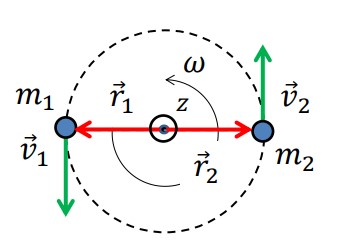
# Momento Angular de 2 particulas em rotação em torno do centro de massa
L=IW
I=m1r12+m2r22
# Momento Angular de um corpo em rotação em torno de um eixo principal de inércia
L=Iw
I=ΣmiRi2
# Momento de Inércia para um corpo contínuo linear:
Por exemplo: Arame ou Anel (Coisas com uma massa certa por unidade de comprimento)
I=∫R2dm=∫R2μdr
Por exemplo:
Rotação de um anel em torno de um eixo perpendicular que passe pelo centro do mesmo. O anel tem 1 eixo principal de inércia vertical, mas também tem eixos horizontais de inércia infinitos.
I=∫R2dm=∫R2μdl=μR2∫02πdθ=μR2(2πR)=MR2
# Momento de inércia no caso de um corpo contínuo de espessura desprezável
Por exemplo: folha de papel.
I=∬R2dm=∬R2σds
em que σ é a densidade superficial.
Por exemplo:
Rotação de um cilindro oco homogéneo de espessura desprezável em torno do eixo de simetria cilindrica.
I=∬R2dm=∬R2σdS=
R2∫0h∫02πσRdθdz=σR2∫0hdz∫02πRdθ=σR2(2πRh)
# Momento de inércia no caso de um corpo contínuo em 3D
∭R2dm=∭R2ρdV
em que ρ é a densidade
Por exemplo:
Rotação de um cilindro maciço homogéneo em torno de eixo de simetria cilindrica. (Cilindro totalmente fechado)
I=∭r2ρdV=
ρ∫0h∫0R∫02π(rdθdrdz)=
ρ∫0hdz∫0Rr3dr∫02πdθ=
ρh4R42π=2R2(πR2hρ)
I=2MR2
Outros exemplos
Rotação de uma barra homogéneo de secção desprezável em torno do eixo perpendicular que passe pelo centro de massa.
μ∫2−l2lx2dx=μ[3x3]_2−l2l=μ314l3=μl12l2
Rotação de uma esfera maciça homogénea em torno de um eixo que passe pelo centro.
Quando o eixo não é o eixo principal de inércia (o eixo de rotação não é um eixo principal de inércia). Este eixo é definido pela direção da velocidade angular w=(wx,wy.wz)
L=∑ri×pi
=∑ri×(mivi)
=∑miri×(w×ri)
No caso geral do corpo rigido, composto por massas elementares m_i com coordenadas w=(wx,wy,wz)
Se o eixo de rotação for um eixo de simetria, os elementos não diagonais anulam-se. Neste caso, o eixo chama-se um eixo principal de inércia e os elementos diagonais correspondem aos momentos de inércia.
=⎣⎢⎡Ixx000Iyy000Izz⎦⎥⎤⎣⎢⎡wxwywz⎦⎥⎤
# Variação do momento angular por efeito de forças exteriores
Num sistema isolado podemos verificar:
L=∑ri×pi=Constante
dtdL=0
dtdL=dtd[∑ri×pi]=
∑(dtdri×pi+ri×dtdpi)
∑ri×Fiext
Momento das forças exteriores
Next=∑ri×Fiext
dtdL=Next
Condições de equilíbrio
Movimento de Translação
∑Fext=0
Movimento de Rotação
∑Next=0
# Momento Angular, Campo de forças central e Leis de Kepler
Consideramos de um campo de forças conservativo, associado a uma energia potencial U(r) dependente apenas da distância r a um ponto central (campo de forças central).
Um campo de forças com estas propriedades corresponde a uma interação independente da direção do espaço, para pontos situados à mesma distância, r, da origem (simetria esférica).
Campo elétrico de uma carga pontual. Interação de Coulomb
V=KrQ
E=kr2Qer
# Relacionar o campo de forças central com o momento angular
A força depende apenas da distância (o potencial U só depende da distância).
A força tem a direção radial, o momento dessa força relativamente ao centro vai ser zero.
N=r×F=0
F=−∂r∂Ue
N=0⟹dtdL=0⟹L=Constante
Campos de forças central ⟹ Conservação do momento linear, o que implica que L=Constante como L=r×mv⟹ que as órbitas são planas, L é perpendicular ao plano de órbita.
Assim, está explicada parte de 1º Lei de Kepler que nos diz que os planetas orbitam em órbitas elipticas em que o sol ocupa um dos focos.
Nota: Pela 3ª Lei de Kepler, os cubos dos raios (médios) das órbitas são proporcionais aos quadrados dos períodos orbitais.