# Arquitetura do processador: Pipelining
Principais alterações:
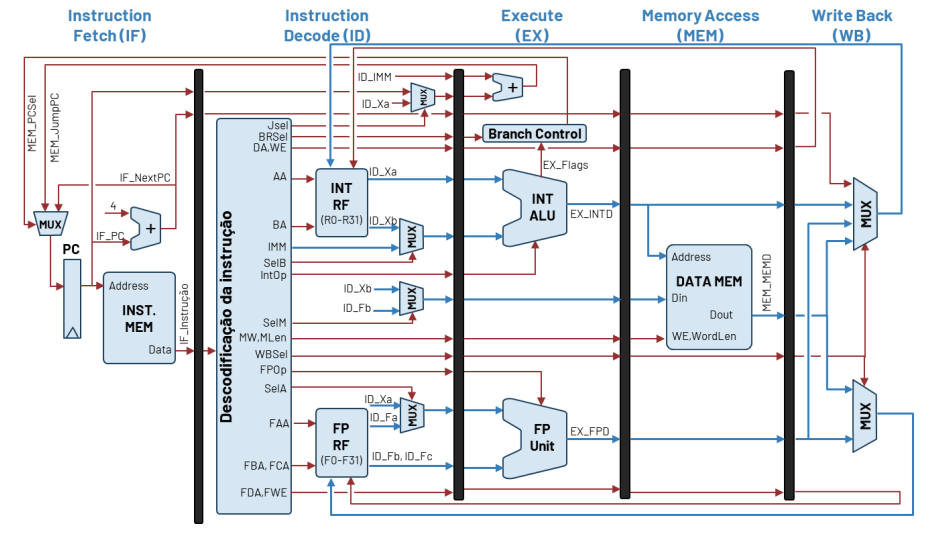
- Introdução de registos de pipeline entra estágios do processador.
Vantagens: Redução do caminho critico Período de relógio menor e maior frequência de relógio.
Os sinais devem atravessar os registos de pipeline: Cada sinal possui agora diversas designações dependendo dos estágios em que são produzidos/consumidos.
O estágio de IF, por omissão, "incrementa" sempre o PC, registando apenas um salto quando a instrução branch chega ao estágio de MEM.
Em cada ciclo há uma instrução diferente em cada estágio do pipeline. Em cada ciclo as instruções deslocam-se entrando uma para o estágio de IF e saido uma instrução (fim de execução) no estágio de WB.
# Desempenho do processador
Medida inversamente proporcional ao tempo de execução.
Latência: Tempo que demora cada instrução a ser executada.
Ritmo de execução: Número de instruções que são terminadas em cada ciclo de relógio.
Para uma arquitetura Pipeline tem-se:
Nº de ciclos por executar N instruções: N + (S-1) em que S é igual ao número de estágios.
Periodo de relógio : limitado pelo maior caminho critico que se deverá ao acesso à memória ou à execução de uma instrução de FP.
Tempo de execução (para N >> S):
Speedup:
Assim, o desempenho do processador, em condições ideais, aumenta proporcionalmente ao número de estágios de pipeline. Contudo na prática:
- Quando o número de estágios aumenta muito, o tempo de propagação e setup dos flip-flops deixa de ser desprezável.
- A divisão do processador em estágios nunca é totalmente equilibrada.
- Esta estimativa ignora a dependência entre instruções.
# Identificação de conflitos
Um conflito ocorre sempre que o funcionamento do pipeline leva a que a dependência não seja respeitada, ou seja, o valor lido de um (ou mais) operandos não corresponde ao valor correto.
Conflito (Hazard): Toda e qualquer situação em que não seja possível executar uma determinada instrução no instante em que ela é processada pelo processador.
Conflitos de dados: Os operandos da instrução ainda não estam disponiveis para serem lidos.
Conflitos de controlo: Originados por uma instrução de controlo de fluxos (branches). A arquitetura não sabe a instrução seguinte a executar.
Conflitos estruturais: Falta de recursos em hardware para executar uma dada instrução.
COLOCAR EXEMPLOS
# Resolução de conflitos por software
- Inserir 1 ou mais instruções NOP entre instruções dependentes de forma a garantir a inexistência de conflitos.
- Reordenar as instruções também de forma a garantir a inexistência de conflitos.
Nota
Método pouco intuitivo ou eficiente, pois requer que o programador conheça a arquitetura e com a introdução de muitos NOPs reduz o desempenho do processador
# Resolução de conflitos por hardware - Forwarding
STALL: Podemos antecipar para o pipeline nos estágios IF e ID, de forma a repetir as mesmas instruções. As instruções anteriores avançam. Isto resolve o problema do programador, mas a arquitetura é igualmente ineficiente.
Dica
Quando se trata da instrução k-1 (imediatamente anterior):
MEM EX
Se for um lw WB EX e é necessário a introdução de um STALL
Quando é k-2:
- WB EX
Quando é k-3:
- Temos os registos transparentes.
# Resolução de conflitos - Execução especulativa
Escolhe uma opção, preferencialmente a correta, e corrige se necessário.
Realização da predição de salto:
- É necessário saber se a instrução no IF é um branch, para prever o próximo PC.
- Mas a descodificação só é realizada no ID.
- Sem a outra informação, a única hipotese é admitir sempre que a instrução que entra no IF não é um branch.
# Static branch prediction: Predict not taken
Static: Os preditores mais avançados, tipicamente encontrados na generalidade dos PCs, tablets ou telemóveis, usam um esquema dinâmico que tem em conta não só o histórico de cada instrução de controlo (jump/branch), como também a correlação entre instruções de controlo.
Predict not taken: A previsão “Predict Taken”, em geral, só é possível com esquemas dinâmicos, já que requer o conhecimento da existência de uma instrução de salto no estágio de IF, e ainda saber qual o destino de salto.
Assim:
Static branch prediction: Admite sempre que a instrução que entra no IF não é um branch.
Invalidate: Transforma a instrução carregada no registo da pipeline num NOP (colocando todas as enables de escrita a 0).
Se a predição estiver errada, ou seja, era suposto saltar e não saltamos, então perdemos 3 instruções.
Em alternativa: Antecipar a unidade de controlo para um estágio anterior, mesmo que custe um maior número de conflito de dados.
Mover a unidade de controlo de salto para o estágio EX permite reduzir o impacto de uma predição errada para 2 ciclos.
Mover a unidade de controlo de salto para o estágio de ID permite reduzir o impacto de uma predição errada para 1 ciclo.
As soluções mais tipicas são assim:
Processadores simples/low-power: Unidades de controlo de salto no estágio de ID.
Processadores de elevado desempenho: Unidade de controlo de salto no Estágio EX. Utilização de técnicas de predição dinâmica de salto.
# Atendimento de interrupções e exceções
As exceções podem ser:
- Recuperáveis: A existência de uma exceção não impede que o programa continue a executar.
- Não recuperáveis: A existência da exceção obriga que o programa termine a execução.
As interrupções causadas por eventos externos são, em geral, sempre recuperáveis.